About
In the last article(https://eye.kohei-kevin.com/2025/03/03/optimization-solver-ooenmdao/), I tested simple non linear optimization problem with a liner constraint. I tried other form to practice implementing with OpenMDAO. I want to become familiar with this framework, gradually make the problems more complex, and develop them into interesting challenges.
Task
Objective
\min_{x}k^T X^{-1} k \\
\text{where }X = \begin{bmatrix} x_1 + 1 & 0.5 \\ 0.5 & x_2 + 1 \end{bmatrix}\\
\text{subject to } x_1+x_2=5Result
Implementation
import numpy as np
import openmdao.api as om
from matplotlib import pylab as plt
class InverseQuadraticObjective(om.ExplicitComponent):
""" minimize objective k^T X^{-1} k """
def initialize(self):
self.options.declare('k', types=np.ndarray)
def setup(self):
self.add_input('x', shape=(2,))
self.add_output('f', val=0.0)
self.declare_partials('f', 'x')
def compute(self, inputs, outputs):
x1, x2 = inputs['x']
k = self.options['k']
X = np.array([[x1 + 1, 0.5],
[0.5, x2 + 1]])
X_inv = np.linalg.inv(X)
outputs['f'] = k.T @ X_inv @ k
def compute_partials(self, inputs, partials):
x1, x2 = inputs['x']
k = self.options['k']
X = np.array([[x1 + 1, 0.5],
[0.5, x2 + 1]])
X_inv = np.linalg.inv(X)
dX1 = np.array([[1, 0], [0, 0]])
dX2 = np.array([[0, 0], [0, 1]])
dX1_inv = -X_inv @ dX1 @ X_inv
dX2_inv = -X_inv @ dX2 @ X_inv
partials['f', 'x'] = np.array([
k.T @ dX1_inv @ k,
k.T @ dX2_inv @ k
])
class LinearConstraint(om.ExplicitComponent):
def setup(self):
self.add_input('x', shape=(2,))
self.add_output('g', val=0.0)
self.declare_partials('g', 'x', val=[1.0, 1.0])
def compute(self, inputs, outputs):
x1, x2 = inputs['x']
outputs['g'] = x1 + x2 - 5
prob = om.Problem()
model = prob.model
k = np.array([1.0, 2.0])
model.add_subsystem('objective', InverseQuadraticObjective(k=k), promotes=['x', 'f'])
model.add_subsystem('constraint', LinearConstraint(), promotes=['x', 'g'])
model.add_design_var('x', lower=0.1, upper=5.0)
model.add_objective('f')
model.add_constraint('g', equals=0.0)
prob.driver = om.ScipyOptimizeDriver(optimizer='SLSQP', tol=1e-6)
prob.setup()
prob.set_val('x', np.array([0.5, 0.5]))
prob.run_driver()
optimal_x = prob.get_val('x')
optimal_f = prob.get_val('f')
x1_vals = np.linspace(0.1, 5.0, 100)
x2_vals = np.linspace(0.1, 5.0, 100)
X1, X2 = np.meshgrid(x1_vals, x2_vals)
Z = np.zeros_like(X1)
for i in range(X1.shape[0]):
for j in range(X1.shape[1]):
x1, x2 = X1[i, j], X2[i, j]
X = np.array([[x1 + 1, 0.5], [0.5, x2 + 1]])
X_inv = np.linalg.inv(X)
Z[i, j] = k.T @ X_inv @ k
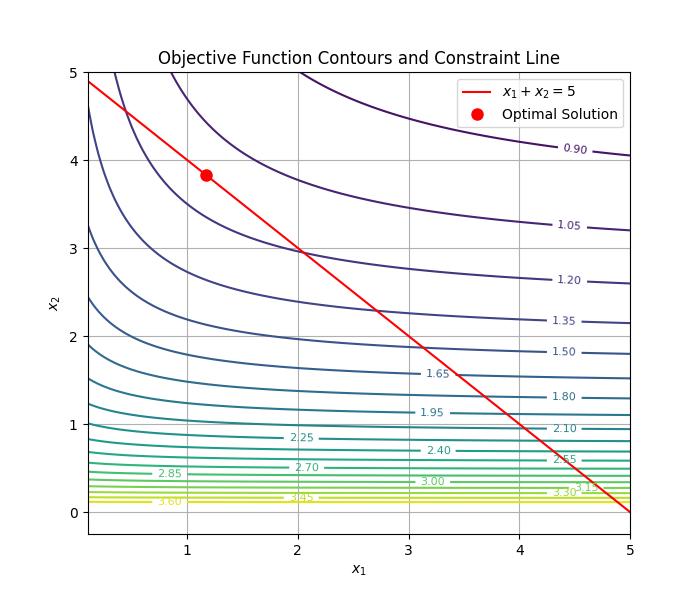
fig, ax = plt.subplots(figsize=(7, 6))
contours = ax.contour(X1, X2, Z, levels=20, cmap="viridis")
ax.clabel(contours, inline=True, fontsize=8)
x1_line = np.linspace(0.1, 5.0, 100)
x2_line = 5 - x1_line
ax.plot(x1_line, x2_line, 'r-', label=r'$x_1 + x_2 = 5$')
ax.plot(optimal_x[0], optimal_x[1], 'ro', markersize=8, label="Optimal Solution")
ax.set_xlabel(r'$x_1$')
ax.set_ylabel(r'$x_2$')
ax.set_title("Objective Function Contours and Constraint Line")
ax.legend()
ax.grid(True)
plt.savefig("test-2.jpg")